

ブログ
スタッフブログ
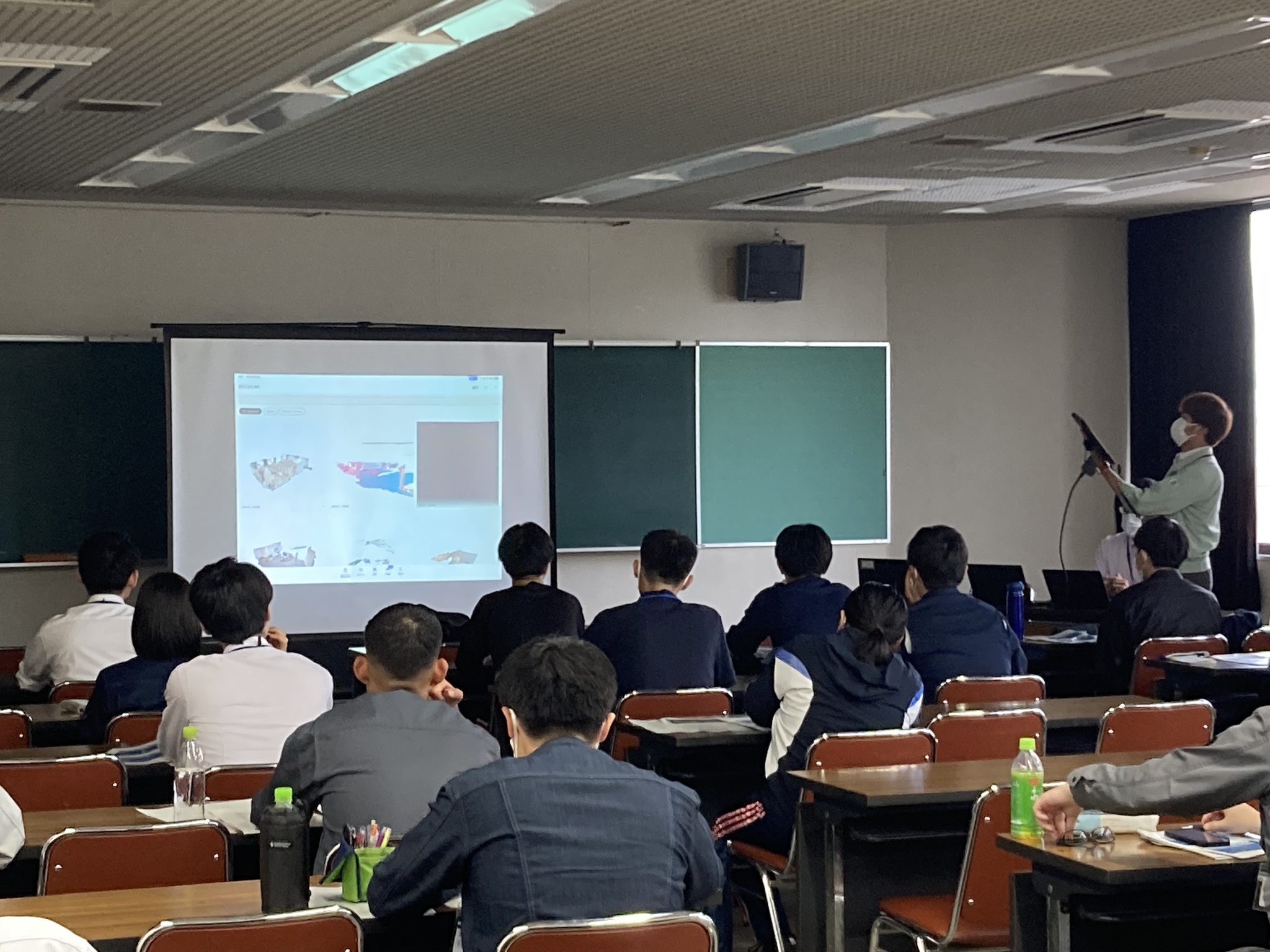
徳島県の新採研修のお手伝いをさせていただきました

ゴールデンウィークの白馬岳






スマホ測量




iPad proのLidar計測
いろんなネタをやりっぱなしで後を全くこちらに載せられていないのですが(レーザードローンやらBIM/CIMのはなしなど)、納品成果になるとブログにアップするのは気をつけないといけませんので、ご興味のある方はご連絡くださいね。お話できる範囲でご説明します。
さて、iPad Pro(i phone Pro)は2020年発売モデルからLidar(レーザーセンサ)が採用されています。言えば携帯式のレーザースキャナーになるということですね。
土木分野でもこれを活用しようという動きがあり、ICT施工の小規模土工での施工管理では国土交通省でも認められています。(PDFの1040ページ → 001475914.pdf (mlit.go.jp) )
また、これを活用した出来形管理システムがすでに販売されています。
当社でもiPad Proを購入していたので、これを活用して設計業務の現場を計測してみました。結果として、測量作業着手前に10分程度の現場作業でこれだけの精度がでるのであれば、十分に説明資料に使えると実感しました。これを整理することで測量範囲の提案や踏査の段階で非常に精度の高い打合せができるようになります。
ただし、レーザードローンと同じ移動体計測になるので、精度を求めるのであればICT施工準拠の商用ソフトを利用しないといけません。目的と精度を比較して適切な手法を選んでください。
今回の設計業務は現場が2箇所ありますが、一方はiPadのLidarで、もう一方はUAV写真測量で現地踏査結果をとりまとめています。
しつこいですが、現場の条件に合わせて手法は適切に!
ドローン活用担当リーダー改めICT活用担当
優良業務(補償関係コンサルタント)表彰式 に出席しました



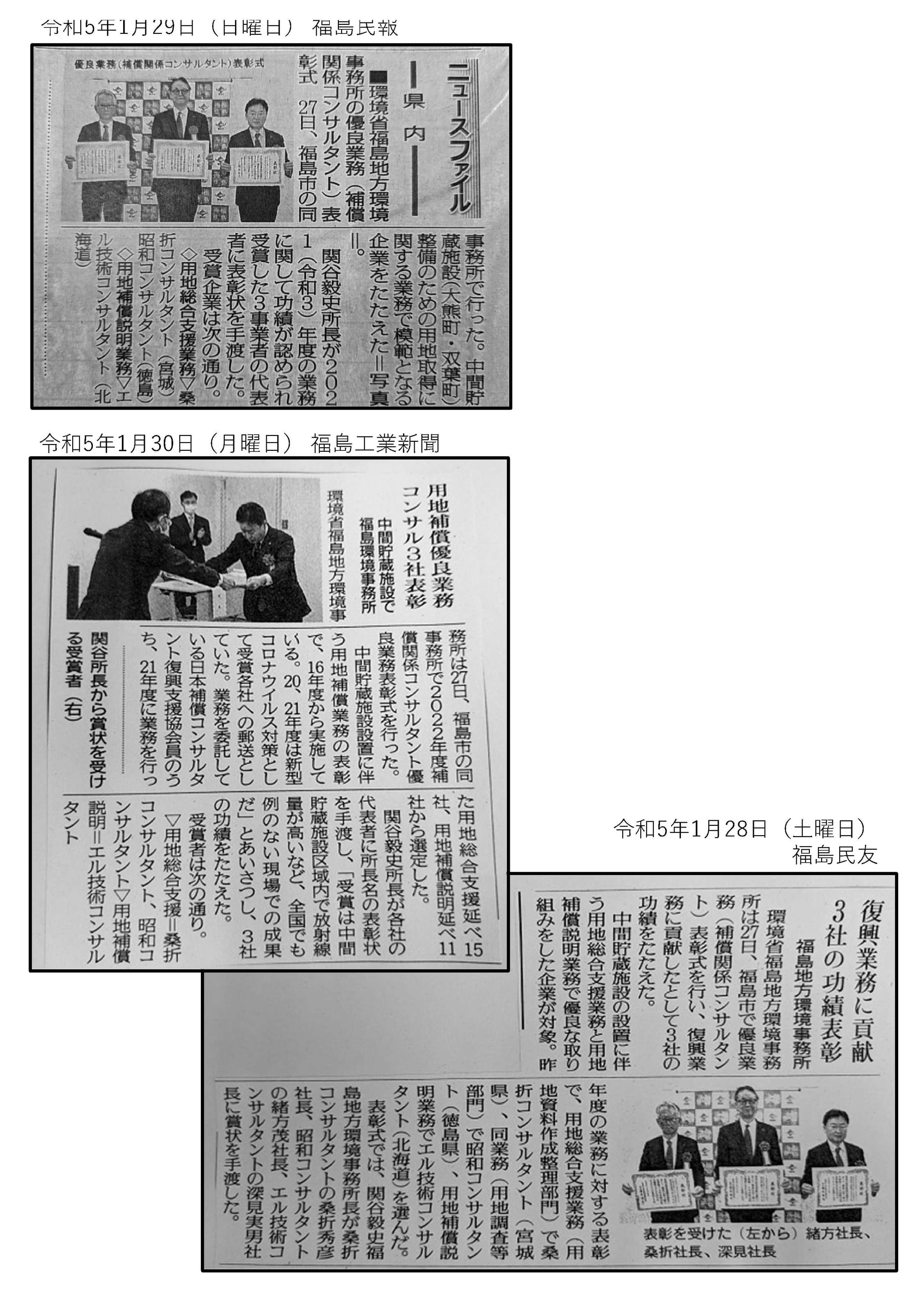
令和5年1月27日に、環境省福島地方環境事務所で、優良業務(補償関係コンサルタント)表彰式 に出席し、「令和3年度 中間貯蔵施設設置に伴う用地総合支援業務」におきまして表彰を受けました。
20、21年度はコロナウィルス対策で表彰式がなかったのですが、3年振りの表彰式に参加出来、緒方社長が賞状を手渡しで受け取りました。
前田部長の優秀な功績が認められ、社員みんなの誇りです。
蒲生田のヴォルティス命
令和5年の初登り







